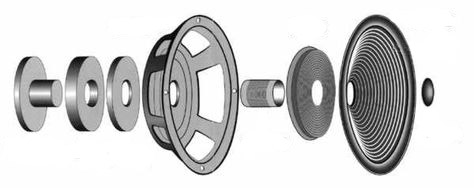
Cet article fait suite à l’étude du haut-parleur électroacoustique. Nous verrons ici ce qu’il advient de ses propriétés et de son rayonnement lorsqu’il est intégré dans un caisson pour réaliser une enceinte.
- Résonance d’un haut-parleur monté dans un caisson
- Rayonnement acoustique
- Diffraction par les bords
- Conclusion
Résonance d’un haut-parleur monté dans un caisson
Variations de pression dans le caisson
Nous avons vu que l’émission en opposition de phase de la face arrière de la membrane crée des interférences destructives néfastes, en particulier dans le domaine des basses fréquences. L’intégration du haut-parleur dans un caisson a pour objectif d’éviter ce court-circuit acoustique : le rayonnement arrière est en effet supprimé.

Soit V_0 le volume du caisson, enfermant de l’air à la pression atmosphérique P_0. Le volume d’air contenu dans le caisson étanche varie en fonction du déplacement de la membrane du haut-parleur de surface S : lorsque l’élongation de la membrane est x, le volume d’air est V=V_0 + \Delta V avec \Delta V = S \cdot x. L’air subit ainsi des successions de compressions et de dilatations au cours des vibrations de la membrane.
Si on suppose, comme d’habitude, que ces transformations sont adiabatiques, il résulte de la loi de Laplace :
\displaystyle{ \frac{ \text d}{\text d V} \left( P\cdot V^\gamma \right) = 0 \iff \frac{ \text{d}P}{\text{d}V} = - \frac{\gamma P}{V} }
Ainsi, si le volume \Delta V balayé par la membrane reste petit devant le volume total du caisson V_0, la surpression résultante peut s’écrire :
\displaystyle{ p = - \frac{\gamma P_0}{V_0} \Delta V = - \frac{\gamma P_0}{V_0} S x }
Équation mécanique
Prenons pour guide l’application de la deuxième loi de Newton au haut-parleur vue précédemment, nous avions obtenu comme équation mécanique du haut-parleur :
(m + 2m_\text{R}) \cdot \ddot{x} + (\alpha + 2R_\text{R}) \cdot \dot{x} + k \cdot x = Bl \cdot i
Deux modifications doivent être réalisées dans la configuration de l’enceinte close :
- D’une part, le rayonnement arrière ayant été supprimé, le facteur 2 devant la résistance de rayonnement R_\text{R} disparaît.
- D’autre part, la surpression p de l’air enfermé dans le caisson ajoute une force F dont l’expression est, d’après le résultat du paragraphe précédent : F = p\cdot S = - \frac{\gamma P_0 S^2}{V_0} x
Cette expression est celle d’une force de rappel F = - k_\text{a} \, x, avec k_\text{a} = \frac{\gamma P_0 S^2}{V_0} la raideur du volume d’air contenu dans le caisson.
Dans l’hypothèse où la surface de la membrane est petite en comparaison de la surface du panneau avant du caisson, la masse d’air déplacée à l’arrière de la membrane est sensiblement égale à celle déplacée à l’avant. La masse totale de l’équipage mobile restera donc m+2m_R
L’équation mécanique du haut-parleur monté dans un caisson est donc :
\displaystyle{ \boxed{ (m + 2m_\text{R}) \cdot \ddot{x} + (\alpha + R_\text{R}) \cdot \dot{x} + \left( k + k_\text{a} \right) \cdot x = Bl \cdot i }}
Le comportement du haut-parleur monté en enceinte close se déduit donc de celui du haut-parleur monté sur un baffle plan infini par les substitutions :
- 2R_\text R \rightarrow R_\text R
- k \rightarrow k_\text{b} = k + k_\text a avec k_\text a = \frac{\gamma P_0 S^2}{V_0}
Nous utiliserons l’indice b (pour “box”) pour toutes les grandeurs relatives au haut-parleur monté dans un caisson.
Fréquence de résonance
En suivant la démarche que nous avions emprunté pour le haut parleur monté sur un baffle plan, on aboutit au schéma électrique équivalent du haut parleur monté dans un caisson :

La résistance et l’inductance motionnelles sont inchangées, mais la capacité motionnelle subit une modification :
\displaystyle{\left\{ \begin{array}{ll} L_{\text{m,b}} = \frac{m +2m_\text{R}}{(Bl)^2}\\ R_{\text{m,b}} = \frac{(Bl)^2}{\alpha} \\ C_{\text{m,b}} = \frac{(Bl)^2}{k_\text b} \end{array}\right.}Il s’ensuit que la résonance du circuit motionnel R,L,C en parallèle se produira à la pulsation :
\displaystyle{\left( \frac{\text{d}\underline{Z}_\text{mot}}{\text{d}\omega}\right)_{\omega=\omega_b} = 0 \iff \omega_b = \frac{1}{\sqrt{L_{\text{m,b}} \cdot C_{\text{m,b}}}} = \sqrt{\frac{k_b}{m + 2m_\text{R}}}}Le numérateur de l’expression est plus grand que dans le cas d’un montage sur baffle plan, et le dénominateur est le même : la fréquence de résonance du haut-parleur est donc augmentée lors de son installation dans un caisson.
Le haut-parleur monté dans un caisson aura donc une fréquence de coupure dans les basses plus élevée.
La perte d’émission dans les graves sera d’autant plus marquée que la raideur k_\text a de l’air contenu dans le caisson sera importante, celle ci augmentant lorsque le volume V_0 du caisson diminue.La fréquence de coupure du haut-parleur sera multipliée par \sqrt{2} lorsque k_\text a = k. Ce seuil donne l’ordre de grandeur du volume minimal du caisson à utiliser.
Il est d’usage d’introduire ici le volume d’air équivalent à la suspension V_\text{as}, généralement publié dans les données constructeur des haut-parleurs. La raideur k du haut-parleur serait obtenue avec un volume d’air
\boxed{ \displaystyle{ V_\text{as} = \frac{\gamma P_0 S^2}{k} }}
Pour monter un haut-parleur en enceinte close sans trop augmenter la fréquence de coupure, il faudra donc un volume de caisson au moins quelques fois supérieur à V_\text{as}.
Exemple
Illustrons ces propos par un exemple numérique. Rappelons les données constructeur du haut-parleur Monacor SP-165PA que nous avions pris en exemple dans l’article précédent :
- Surface efficace de la membrane S = 137\times10^{-4}\,\text{m}^2
- Masse de l’équipage mobile (bobine + membrane) m = 8,2\times10^{-3} \,\text{kg})
- Raideur de la suspension élastique k = 4,0\times 10^{3} \,\text{N}\,\text{m}^{-1})
- Résistance mécanique de la suspension \alpha= 1,2 \,\text{kg}\,\text{s}^{-1}
- Résistance de la bobine R_e = 6.9\,\Omega
- Inductance de la bobine L_e= 0,50 \times10^{-3} \,\text{H}
- Facteur de force Bl = 7,1 \,\text{T}\,\text{m}
On a pour ce haut-parleur \displaystyle{ V_\text{as} = 6,6 \,\text{L} }. Si on choisit de le monter dans un caisson de volume V_0=40\,\text{L} \approx 6 V_\text{as}, on aura : k_\text a = \frac{\gamma P_0 S^2}{V_0} = 6,7 \times 10^2 \,\text{N}\,\text{m}^{-1}
La raideur totale sera : k_\text b = k + k_\text a = 4,7 \times 10^3 \,\text{N}\,\text{m}^{-1}
Et la pulsation de résonance : \omega_\text b = \sqrt{\frac{k_b}{m + m_\text{R}}} = 654 \, \text{rad} \, \text{s}^{-1} = 1,08 \, \omega_0
La fréquence de coupure aura ainsi augmenté de 8%, passant de 96 à 104 Hz.
Rayonnement acoustique
Fonction de transfert
Le schéma acoustique équivalent au haut-parleur monté dans un caisson est :

- Pression excitatrice \underline{p}_g=\underline{P}_g \exp (j\omega t) avec \underline{P}_g = \frac{(Bl)\cdot\underline{U}}{S\cdot R_e}, exprimée en Pascals.
- Débit \underline{q} = \underline{Q} \exp (j\omega t), en \text{m}^3/\text{s}
- Résistances acoustiques, en \text{Pa}\cdot\text{s}/\text{m}^3:
- R_{ae}=\frac{(Bl)^2}{S^2 R_e} (pertes électriques dans la bobine)
- R_{ab}=\frac{\alpha}{S^2} (pertes par frottements)
- La compliance acoustique en \text{m}^3/\text{Pa} : C_{ab}=\frac{S^2}{k_b}.
- La masse acoustique en \text{kg}/\text{m}^4 : M_{ab}=\frac{m + m_\text{R}}{S^2}
- Résistance acoustique de rayonnement avant R_{ar}=\frac{R_\text{R}}{S^2}
Posons :
- \delta = \frac{\omega_b}{\omega_s} = 1,08 ;
- Q_{eb} =\frac{1}{\omega_b C_{ab}R_{ae}} le facteur de qualité électrique ;
- Q_{mb} =\frac{1}{\omega_b C_{ab}R_{ab}} le facteur de qualité mécanique ;
- Q_{tb} le facteur de qualité total tel que \frac{1}{Q_{tb}} = \frac{1}{Q_{eb}} + \frac{1}{Q_{mb}} .
Reprenons l’exemple du Monacor déjà étudié, monté dans un caisson de 40 L :
| Montage sur baffle plan | Montage dans caisson de 40 L |
| \omega_s = 606 \, \text{rad}\,\text{s}^{-1} | \omega_b = \delta \omega_s = 654 \, \text{rad}\,\text{s}^{-1} |
| Q_\text{es} = 1,1 | Q_{eb}=1,0 |
| Q_\text{ms} = 5,0 | Q_\text{mb} = 4,6 |
| Q_\text{ts} = 0,91 | Q_\text{tb} = 0,83 |
Les facteurs de qualité diminuent en intégrant le haut-parleur dans un caisson, et ce d’autant plus que le volume du caisson est petit.
L’expression du débit, obtenue en suivant la démarche exposée dans l’article précédent, est alors :
\displaystyle{ \underline{Q}_b = \frac{j\delta \nu}{( j \delta \nu)^2 +\frac{j \delta \nu}{Q_{tb}} + 1} \cdot \omega_b C_{ab} \underline{P}_g = \frac{j\delta \nu}{( j \delta \nu)^2 +\frac{j \delta \nu}{Q_{tb}} + 1} \cdot \frac{ \omega_s C_{as}}{\delta} \underline{P}_g }où \nu = \frac{\omega}{\omega_s} est la pulsation réduite définie par rapport à la pulsation de résonance du haut-parleur monté en baffle plan et où le deuxième terme a été réécrit en fonction des valeurs du haut-parleur monté en baffle plan.
Phénomène de baffle (baffle step)
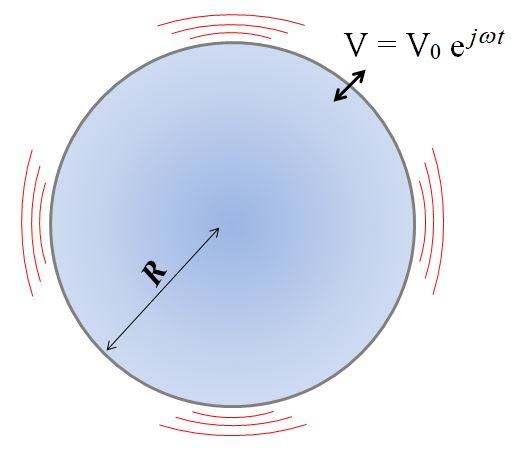
Lorsque nous avons étudié le monopôle acoustique, nous avons signalé qu’il modélisait de manière très satisfaisante le rayonnement d’une enceinte close aux très basses fréquences. En effet, la longueur d’onde étant supérieure aux dimensions L du baffle (f < c / L), celui-ci est invisible pour les ondes sonores émises. Le rayonnement est alors isotrope dans tout l’espace.
Puis nous avons étudié le modèle du piston encastré sur un baffle infini, qui modélise bien le rayonnement d’une enceinte aux fréquences supérieures (f > c / L) : la longueur d’onde étant plus petite que le baffle du caisson, les ondes sonores le voient comme un baffle de grande dimension. Le rayonnement se fait alors principalement dans le demi-espace avant. Tant que la longueur d’onde est supérieure au rayon a du haut-parleur, ce rayonnement est lui aussi très peu directif.
Dans la fonction de transfert obtenue au paragraphe précédent, il faudra donc utiliser le modèle du monopôle pour les basses fréquences et celui du piston bafflé pour les fréquences supérieures. La transition entre ces deux modèles est appelée phénomène de baffle, ou baffle step en anglais.
Puissances rayonnées dans les deux modèles
La puissance rayonnée s’obtient à partir de la fonction de transfert de la même manière que nous l’avons obtenue pour le rayonnement du haut-parleur monté sur un baffle infini. La différence entre le rayonnement monopolaire (basse fréquence) et celui du piston bafflé (hautes fréquences) tient à la résistance de rayonnement R_R, qui est doublée pour le piston bafflé. On obtient ainsi pour le piston bafflé :
\displaystyle{ { \mathcal{P}_{ar,b,\text{HF}} = \frac{\rho_0}{4\pi c} \left( \frac{\omega_s^2 C_{as} \underline{P}_g}{\delta^2} \right) ^2 \left|\underline{H}_{P,b}\right|^2} \hspace{1cm} \text{avec} \hspace{1cm}\underline{H}_{P,b} = \frac{\delta^2\nu^2}{( j\delta\nu)^2 +\frac{j\delta\nu}{Q_{tb}} + 1} }Dans le cas du monopôle, on obtient deux fois moins :
\displaystyle{ { \mathcal{P}_{ar,b,\text{BF}} = \frac{\rho_0}{8\pi c} \left( \frac{\omega_s^2 C_{as} \underline{P}_g}{\delta^2} \right) ^2 \left|\underline{H}_{P,b}\right|^2}} = \frac{ \mathcal{P}_{ar,b,\text{HF}}}{2}Dans les basses fréquences, la valeur maximale de la puissance rayonnée est ainsi divisée par 2\delta^4 par rapport au même haut-parleur monté en baffle plan. Afin d’optimiser la fréquence de coupure dans les basses et le niveau sonore, on aura donc tout intérêt à placer le haut-parleur dans un caisson de volume suffisamment grand pour que \delta soit proche de 1.
Le rendement \eta_b du haut-parleur monté dans une enceinte close est lui calculé dans les hautes fréquences, lorsque \left|\underline{H}_{P,b}\right| \approx 1 : on a donc \eta_b = \frac{\eta_0}{\delta^4}. Pour notre exemple, on obtient 0,6\%.
La sensibilité L_{1,b} de l’enceinte est quant à elle réduite de 10\cdot \log{\delta^4}, soit une chute de 1,3\,\text{dB} pour l’enceinte considérée : on obtient L_1 = 90,2\,\text{dB}.
Transition baffle step
Aux hautes fréquences, les ondes sonores sont émises dans le demi-espace avant du caisson. A une distance r de l’enceinte, la puissance émise se dilue sur une demi-sphère de surface 2\pi r^2 et l’intensité sonore est :
\displaystyle{ I_\text{HF} = \frac{ \mathcal{P}_{ar,b,\text{HF}} }{2\pi r^2}}Aux basses fréquences, les ondes sonores sont émises dans tout l’espace, la surface sur laquelle se dilue l’énergie est donc 4\pi r^2. On a alors :
\displaystyle{ I_\text{BF} = \frac{ \mathcal{P}_{ar,b,\text{BF}} }{4\pi r^2} = \frac{I_\text{HF}}{4}}La transition liée au phénomène de baffle s’accompagne donc d’une diminution de 6\text{dB} dans les graves.
Sur quelles fréquences s’étale le phénomène de baffle ?

La diffraction est quantifiée par l’angle \theta d’étalement de l’onde. Pour l’obstacle de dimension L qu’est le caisson de l’enceinte, on a :
\theta = \frac{\lambda}{L}
Une onde émise par le haut-parleur le long du baffle sera significativement diffractée vers l’arrière dès lors que \theta \approx \frac{\pi}{4}. Cela correspond à \lambda_1 \approx 0,7L. Le rayonnement deviendra isotrope dans l’espace lorsque \theta \approx 2\pi, soit \lambda_2 \approx 6 L. La fréquence de transition est celle pour laquelle l’atténuation est moitié de sa valeur maximale, soit :
f_\text{step} = \sqrt{f_1 f_2} = \sqrt{\frac{c^2}{\lambda_1\lambda_2} } \approx \frac{1}{2} \frac{c}{L}
f_1 \approx 3 \, f_\text{step}, f_2 \approx \frac{f_\text{step}}{3}
Ou encore
\lambda_\text{step} = \frac{c}{f_\text{step}} \approx 2L
\lambda_1 \approx \frac{\lambda_\text{step}}{3}, \lambda_2 \approx 3 \, \lambda_\text{step}
On peut construire un bon modèle mathématique de la transition à l’aide d’une approximation bien connue de la fonction step de Heavyside :
H(f) \approx 6 \times \left( \left( 1 + \exp{ \left( -2 k \ln{\frac{f}{f_\text{step}}} \right) } \right)^{-1} -1 \right)
avec k=2 permettant l’étalement du phénomène sur l’intervalle \left[ \frac{f_\text{step}}{3} ; 3 \, f_\text{step} \right] :

Niveau sonore de l’enceinte close
Nous pouvons donc maintenant calculer l’intensité sonore aux hautes fréquences avec l’expression obtenue plus haut, en déduire le niveau sonore et prendre en compte la transition vers un rayonnement monopolaire aux basses fréquences en lui ajoutant la transition baffle step.
Pour notre enceinte de 40L, choisissons une profondeur du caisson de 25 cm et un baffle circulaire de 22,5 cm de rayon, le haut-parleur étant monté au centre de celui-ci. Je ne vous conseille pas une telle géométrie, mais elle permet de n’avoir qu’une unique dimension L=0,45 \,\text{m} à considérer. On obtient, avec un phénomène de baffle à 380 Hz s’étalant de 127 Hz à 1.14 kHz :

Les droites verticales vertes indiquent les fréquences de coupure à -3dB et les rouges les limites de la transition baffle step
La coupure haute-fréquence à 5500 Hz a été ajoutée artificiellement à partir des observations expérimentales de l’article précédent.
Notons tout de même que, dans un cas réel d’écoute dans une pièce, une fraction non négligeable des ondes sonores graves émises vers l’arrière de l’enceinte sera réfléchie par les murs, augmentant de fait le niveau perçu des basses. Le phénomène de baffle provoquera donc plutôt une diminution de 2 à 4 dB que de 6dB.
Notons aussi que, lorsque le caisson est rectangulaire, la transition sera adoucie du fait de fréquences de transition différentes pour les différentes tailles de l’obstacle vues par l’onde :


Par exemple, pour un même volume de caisson de 40L et une même profondeur de 25cm, un baffle rectangulaire de dimension 30 \times 50 \,\text{cm} aura une transition de phénomène de baffle qui s’étendra de \lambda_1 \approx 0,7 \,L_{min}=21\,\text{cm} à \lambda_{max} \approx 6 \,L_{max}=3,0 \,\text{m}, soit :
f_{min}=114\,\text{Hz} \,\, ; \,\, f_{max}=1,63\,\text{kHz}, \,\,f_\text{step}=\sqrt{f_{min}f_{max}}=430\,\text{Hz}

Diffraction par les bords
Position du problème
On s’intéresse dans cette section au côté “hautes-fréquences” du phénomène de baffle : les ondes sonores sont supposées contraintes à se propager dans un demi-espace délimité par le baffle.
Considérons une onde sphérique. Le principe d’Huygens-Fresnel stipule que chaque point du milieu perturbé par l’onde devient lui-même une source élémentaire secondaire, la combinaison des perturbations générées par ces sources secondaires constituant le nouveau front d’onde :

Lorsque l’onde se propageant le long du baffle atteint sa périphérie, elle rencontre une discontinuité puisque le volume disponible pour sa propagation change : il passe d’une demi-sphère à une sphère. La pression chute d’un facteur 2 et les sources secondaires ne forment alors plus un ensemble cohérent avec leur prédécesseurs, il faut les considérer comme une nouvelle source. On parle de diffraction par le bord du baffle.
Du fait de leur déphasage, provenant du délai induit par la propagation jusqu’au bord du baffle, l’onde directe et l’onde diffractée interfèrent au point d’observation : la pression acoustique présentera des pics lorsque les ondes sont en phase et des creux lorsqu’elles sont en opposition de phase.
Cas d’un baffle circulaire
Dans un souci de simplification visant à se concentrer sur les effets physiques, nous nous restreindrons dans un premier temps au cas défavorable d’un baffle circulaire observé dans l’axe.
Nous nous intéressons ici au haute-fréquences : changeons donc notre haut-parleur d’étude pour un tweeter Dayton DC28FT de rayon a=14 \,\text{mm}, de fréquence de résonance f_s = 834 \,\text{Hz} et de facteur de qualité total Q_\text{ts} = 0,50. Ce haut-parleur est monté dans une enceinte close, au centre d’un baffle circulaire de rayon R= 22,5 \,\text{cm}. Il n’y a pas de modification de la fréquence de résonance pour le tweeter : il est monté en usine dans un caisson étanche (le caisson servirait, dans un cas réel d’enceinte deux-voies, à supprimer le court-circuit acoustique du HP de graves).
Sa courbe de réponse théorique est alors, en tenant compte du phénomène de baffle :

La distance parcourue par l’onde en atteignant le bord du baffle est égale aux rayon R du baffle. Le bord du baffle se comporte donc comme une deuxième source émettant à la même fréquence que le haut parleur mais avec un retard \tau = R/c, durée nécessaire pour atteindre le bord du baffle en partant de son centre.

L’onde directe se propageant dans un demi-espace a pour expression au point M :
\displaystyle{ p_0 = \frac{j \omega \rho Q_0}{2\pi} \cdot \frac{\exp{j \left( \omega t - k r_0\right) }} {r_0} }
L’onde diffractée émise par une source secondaire infinitésimale de longueur \text{d}\mathcal{l} = R\cdot \text{d}\varphi s’écrit quant à elle:
\displaystyle{ \text{d}p_1 = D(0) \cdot \frac{j \omega \rho Q_0}{4\pi} \cdot \frac{ \exp{ \left[ j \left( \omega t - k \left(r_1+R\right) \right)\right]} } {r_1 + R} \cdot \frac{\text{d}\varphi}{2\pi} }
où D(0) est le facteur de directivité du haut-parleur le long du baffle.
En champ lointain, on a r_1 \approx r_0 et la différence d’amplitude due à la distance parcourue supplémentaire R est négligeable. Il vient :
\displaystyle{ \text{d}p_1 = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \exp{\left( -j k R \right)}\frac{\text{d}\varphi}{2\pi} }
L’intégration le long du cercle est triviale, finalement :
\displaystyle{ p_1 = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \exp{\left( -j k R \right)} }
La pression résultante au point d’observation est donc :
\displaystyle{ p = p_0 + p_1 = p_0 \left( 1 + D(0) \cdot \frac{1}{2} \exp{ \left(- jkR \right) } \right) }
Les ondes directes et diffractées interfèrent au point d’observation via le terme entre parenthèses ; la pression acoustique efficace est :
\displaystyle{ p_\text{eff} = \frac{ \left| p \right| }{\sqrt{2}} = p_{0,\text{eff}} \left( 1 + D(0) \cdot \frac{1}{2} \cos{ \left(kR\right) }\right) }
Les interférences seront constructives lorsque les ondes directe et diffractée sont en phase au point d’observation, i.e. lorsque k R = m \cdot2\pi avec m entier positif, soit \lambda = R/m ou encore f = m c /R. Les ondes seront en opposition de phase, générant des interférences destructives, lorsque k R = \left( m + \frac{1}{2} \right) \cdot2\pi, soit \lambda = R/\left( m + \frac{1}{2} \right) ou encore f = \left( m + \frac{1}{2}\right) c /R.
Le haut-parleur devenant très directif aux hautes fréquences (ka >= 4, le phénomène s’estompe :

Les variations de niveau sonore sont donc de l’ordre de 10 dB au maximum (la pression variant d’un facteur 3 entre 0,5 et 1,5, l’intensité sonore varie d’un facteur 9 et 10 \times \log{9} = 9,5.
On peut maintenant calculer l’intensité sonore I=\frac{p_\text{eff}^2}{\rho c} et le niveau sonore résultant :

Le premier creux, correspondant à \lambda / 2 = R, est masqué partiellement par le phénomène de baffle (la longueur d’onde est grande, le rayonnement de l’enceinte se fait donc quasiment sur une sphère et il y a peu de diffraction). La première bosse en fin de transition baffle-step correspond à \lambda = R puis le creux suivant à \lambda = \frac{2}{3}R, etc.
Observons un agrandissement de la zone d’intérêt, en échelle linéaire de fréquence :

Les pics sont espacés d’environ 1500 Hz, la longueur d’onde correspondante est \lambda = \frac{c}{f} = 22,8\,\text{cm} : on peut ainsi mesurer le rayon du baffle.
Notons ici que l’amplitude des variations sera amoindrie avec des arrêtes arrondies.
Observation hors-axe
On se place maintenant hors-axe, dans un direction définie par l’angle \eta par rapport à l’axe de symétrie du baffle :

Un peu de géométrie permet de voir que la différence de marche supplémentaire de l’onde diffractée par rapport à l’onde directe est \delta = R \sin{\eta}\cos{\varphi}, le déphasage correspondant est \phi_0 = k\delta.
L’onde directe a donc pour expression :
\displaystyle{ p_0 = D\left(\frac{\pi}{2}-\eta\right) \cdot \frac{j \omega \rho Q_0}{2\pi} \cdot \frac{\exp{j \left( \omega t - k r_0\right) }} {r_0} }Et on aura au point d’observation, pour source secondaire infinitésimale \text{d}p_1 :
\displaystyle{ \text{d}p_1 = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \exp{\left( -j k (R - \delta) \right)}\frac{\text{d}\varphi}{2\pi} }L’onde diffractée par le bord du baffle est ainsi :
\displaystyle{ p_1 = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \exp{\left( -j k R\right)} \cdot \int_0^{2\pi} \exp{\left( j k R\sin{\eta}\cos{\varphi}) \right)} \frac{\text{d}\varphi}{2\pi} }L’intégrale dans le dernier terme est : J_0\left(k R \sin(\eta)\right), fonction de Bessel d’ordre 0 :
\displaystyle{ p_1 = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \exp{\left( -j k R\right)} \cdot J_0\left(k R \sin(\eta)\right) }
En sommant l’onde directe p_0 (affectée du facteur de directivité D(\frac{\pi}{2}-\eta) et l’onde diffractée p_1, puis en calculant l’intensité sonore correspondante et en en déduisant le niveau sonore de la même manière que précédemment, on obtient les courbes suivantes :

On constate sans surprise que la diffraction par les bords est moindre hors-axe : en effet, les différentes sources secondaires sur le pourtour du baffle ne sont plus toutes en phase. Ce calcul montre que, lorsqu’on cherche à corriger les pics et les creux dans l’axe par un filtrage numérique, on génère de fait des pics et des creux hors-axe.
Baffle rectangulaire
Penchons nous dorénavant sur le cas plus concret du baffle rectangulaire, observé dans l’axe. Sa géométrie est résumée sur la figure suivante :

Nous avons gardé les dimensions du caisson utilisé dans le calcul du phénomène de baffle : L_1=50\,\text{cm}, L_2=30\,\text{cm}. Le tweeter est positionné aux coordonnées x_t = y_t = 20\,\text{cm}.
L’expression de l’onde directe est identique à celle obtenue dans le cas du baffle circulaire, et une source infinitésimale située à la coordonnée \varphi engendrera au point d’observation, avec les mêmes simplifications que précédemment :
\displaystyle{ \text{d}p_1 = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \exp{\left( -j k b(\varphi) \right)}\frac{\text{d}\varphi}{2\pi} }
L’intégration se fait numériquement, par morceaux pour chacune des arêtes du baffle. Par exemple, pour l’arrête supérieure, on aura :
\displaystyle{ p_{1,\text{top}} = D(0) \cdot \frac{1}{2} \cdot p_0 \cdot \int_{\arctan{\frac{L_1-y_t}{L_2-x_t}}}^{\frac{\pi}{2}+\arctan{\frac{x_t}{L_1-y_t}}} {\exp{\left( -j k \frac{L_1-y_t}{\sin{\varphi}} \right)}\frac{\text{d}\varphi}{2\pi} } }
Le terme d’interférences a l’allure donnée ci-dessous.

On en déduit comme plus haut le niveau sonore du haut-parleur monté dans le caisson :

Comme on pouvait s’y attendre, les effets de la diffraction par les bords du baffle sont nettement moins prononcés qu’avec un baffle circulaire (les sources secondaires ne sont en effet jamais toutes en phase avec l’onde directe). Ici, comme pour le baffle circulaire, la mesure des écarts en fréquence des différents pics permet de déduire la distance entre le haut-parleur et les bords du baffle. Par exemple, les deux pics les plus visibles sur le graphe sont espacés de 3400 Hz, ce qui correspond à une longueur d’onde de 10 cm, distance séparant le haut-parleur du haut du baffle.
L’étude de la directivité est, elle aussi, réalisée par intégration numérique en ajoutant comme dans le cas du baffle circulaire la différence de marche supplémentaire \delta = b(\varphi)\cdot\sin{\eta}\cdot\cos{\varphi} :

Conclusion
Nous avons vu dans cet article les conséquences sur le rayonnement acoustique du scellement d’un haut-parleur dans un caisson : augmentation de la fréquence de résonance, phénomène de baffle et diffraction par les bords du baffle.
Un moyen possible de contrer l’augmentation de la fréquence de résonance et donc de la coupure grave du haut-parleur est d’intégrer un évent dans le caisson pour réaliser une enceinte bass-reflex. Le prochain article y sera consacré.
Sources
Francis BROUCHIER – Haut-parleurs et enceintes acoustiques : Théorie et pratique
Jean Fourcade – Utilitaires Scilab pour le calcul et l’optimisation d’enceintes bass-reflex